




成功案例
加速工程及科技创新,让智能装备的设计研发更简单高效
论文案例:拖拉机 AMT代码自动生成应用技术研究
项目简介:
通用快速原型半实物仿真器项目我司与河南科技大学车辆与交通工程学院深入合作的项目,主要作为拖拉机AMT 自动控制的关键技术研究。本项目中包含了灵思创奇CPCI实时仿真机和Links-RT实时仿真软件包。以下内容大部分引用自-拖拉机AMT代码自动生成应用技术研究论文。
挑战:
拖拉机主要在田间作业,复杂的地形和多变的作业工况容易影响驾驶,并且拖拉机的换挡规律的无法精准的掌握,因此自动变速技术在拖拉机上的应用具有重要意义。AMT(电控机械式自动变速箱)的核心技术是电脑控制,因此电子技术及其控制质量将直接决定AMT的性能与运行质量。
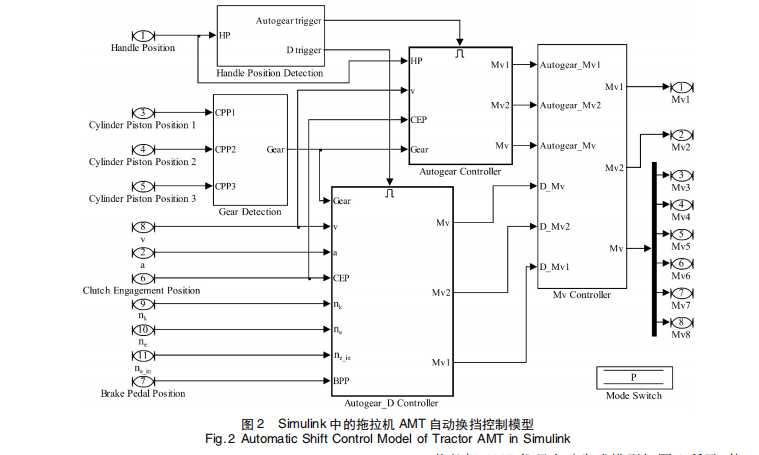
为了实现拖拉机AMT换挡过程的自动控制, 要拖拉机AMT工作原理,进行分析,根据拖拉机特殊的田间作业工况, 通过复杂重复计算求解出拖拉机AMT最佳换挡规律的数据。拖拉机AMT(电控机械式自动变速箱)电控系统软件手工编程难度大、效率低、错误多。
解决方案:
河南科技大学老师提出了一种实现拖拉机AMT电控系统软件开发的方法。基于Simulink/Embedded Coder,分析拖拉机AMT自动换挡控制原理,通过信号处理,数据拟合等一系列计算并利用Simulink工具箱建立了自动换挡控制算法模型, 利用Embedded Coder工具箱搭建拖拉机AMT控制系统模型,基于模型的设计来开发和验证AMT控制技术。验证环节在实时仿真机中进行, 通过北京灵思创奇科技有限公司开发实时仿真管理软件RT-SIM将可执行代码加载至CPCI仿真机来进行快速控制原型仿真,验证了控制算法的正确性。利用CCS软件将可执行代码加载到目标板,将串口与上位机中的发动机仿真模型、拖拉机机组仿真模型相结合并进行硬件在环半实物仿真。
总结:
使用Embedded Coder自动生成拖拉机AMT电控系统代码,缩短了软件开发时间,避免了人工编程容易出错等问题; 研究人员可集中精力在把对拖拉机自动控制的关键技术研究和控制算法。基于MATLAB/Simulink平台, 灵思创奇RT-SIM和DSP进行拖拉机AMT 系统快速控制原型与硬件在环半实物仿真,有效避免了试验测试中被控对象多、被控对象体积大,试验平台搭建困难、搭建时间长等问题,节约了实验成本并提高是实验效率。